 GDU
GDU
 UUUUFLY
UUUUFLY DJI
DJI MMC
MMC GDU
GDU XAG
XAG AOLAN
AOLAN CHILLA
CHILLA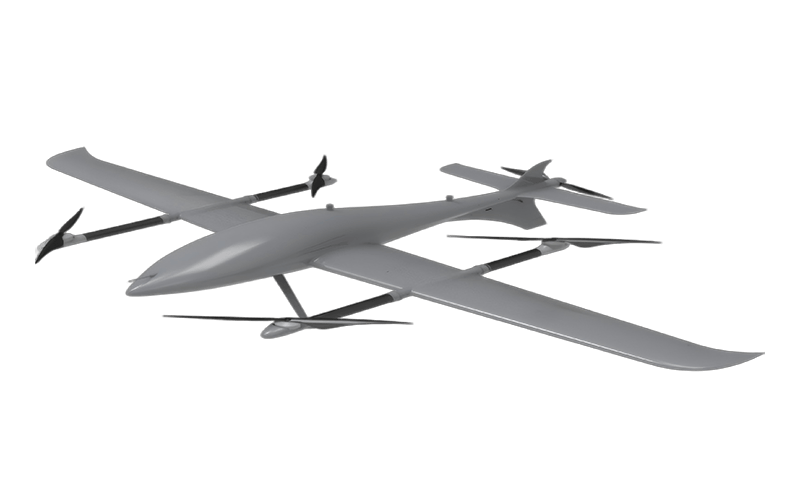 SKY NEXT
SKY NEXT- DJI Matrice-4T
- Drone DJI Matrice 4E
- DJI Matrice 4TD
- DJI Matrice 30T
- DJI Mavic 3 Enterprise
- Drone Multispettrale DJI Mavic 3M
- DJI RC 2 Plus Industry Plus
- Batteria DJI Matrice Serie 4
- Batterie DJI Matrice Serie 4D
- Batteria di volu intelligente TB65
- Batteria di volu intelligente TB100
- Batteria WB37
- Accessori DJI

Dragonfish Standard: eVTOL Multi Missione di Nova Generazione
Dragonfish Standard Versatile Multi-Missione eVTOL UAV
Resistenza equilibrata, flessibilità di carica utile è implementazione rapida per applicazioni di sicurezza industriale è publica

Dragonfish Standard Versatile Multi-Missione eVTOL UAV
Resistenza equilibrata, flessibilità di carica utile è implementazione rapida per applicazioni di sicurezza industriale è publica
Volu Silenziosu
U Dragonfish riesce à ottene un volu ultra-silenziosu grazia à u so sistema di propulsione eccezziunale è à u so cuncepimentu innovativu di riduzione di u rumore. Appena audibile sopra i 400 ft (120 m) AGL*, u DF riduce significativamente u risicu di rilevazione pur assicurendu u sicretu operativu.
Amparate di più >>

Volu Silenziosu
U Dragonfish riesce à ottene un volu ultra-silenziosu grazia à u so sistema di propulsione eccezziunale è à u so cuncepimentu innovativu di riduzione di u rumore. Appena audibile sopra i 400 ft (120 m) AGL*, u DF riduce significativamente u risicu di rilevazione pur assicurendu u sicretu operativu.
Amparate di più >>
Anti-Interferenza Superiore
In ambienti cumplessi, u UAV mantene prestazioni eccezziunali di cumunicazione è trasmissione video, cù forti capacità anti-interferenza è una trasmissione stabile è affidabile.

Anti-Interferenza Superiore
In ambienti cumplessi, u UAV mantene prestazioni eccezziunali di cumunicazione è trasmissione video, cù forti capacità anti-interferenza è una trasmissione stabile è affidabile.
Perchè i prufessiunali sceglienu Dragonfish Standard?

Prutezzione da a perdita GNSS
Quandu si opera in ambienti senza GNSS, u drone attiva a prutezzione d'atterraggio, scendendu automaticamente da a so pusizione attuale per assicurà a sicurezza.
Ritornu di batteria bassa
L'utilizatori ponu persunalizà u livellu di batteria previstu per l'atterraggio. U drone calcula u tempu di ritornu ottimale in tempu reale basatu annantu à i livelli attuali di a batteria è u statu di u volu, assicurendu chì atterri cù un livellu di batteria vicinu à a soglia definita da l'utente.
Ritornu di Segnale Persu
Sè u signale trà u drone è a stazione terrestre hè interrottu, a prutezzione di perdita di cunnessione s'attiva. Sè i signali GNSS sò dispunibili, u drone inizia u ritornu automaticu à a pusizione iniziale.
Annullamentu manuale d'emergenza

Ridundanza Multiple, Garantendu a Sicurezza di a Missione
Autoverifica cù un solu toccu
Esegue automaticamente una verificazione di u sistema prima di u decollo, assicurendu chì ogni volu sia sicuru è affidabile.
Ritornu à un buttone
Ritornu faciule in casa cù u buttone Home. Archiviazione pratica: Organizate rapidamente dopu u volu, faciule da almacenà è prontu per u prossimu usu.
Tracciamentu Intelligente

Decollo è atterraggio di piattaforma mobile
Specifiche di Dragonfish Dragonfish Standard
| Specificazione | Dettagli |
| Tipu | UAV eVTOL multimissione à rotore basculante |
| Dimensioni | 1948 × 3295 × 520 mm (cumprese l'eliche) |
| Pesu | 7,5 kg (cumprese 2 batterie, eliche; senza carica utile gimbal) |
| Capacità massima di carica utile | 1,5 chilò |
| Tempu di volu massimu | 126 minuti (cù a cunfigurazione standard di u payload) |
| Velocità Orizzontale Massima | 120 km/h |
| Velocità Orizzontale Massima | 126 km/h (35 m/s) |
| Resistenza massima à u ventu | 15 m/s (modalità à ala fissa), 12 m/s (modalità di volu verticale) |
| Soffittu di serviziu massimu | 5000 m sopra u livellu di u mare |
| Temperatura di funziunamentu | da -20°C à 50°C |
| Classificazione IP | IP43 |
| Supportu GNSS | GPS + GLONASS + BeiDou + Galileo (pusizionamentu multi-custellazione) |
| Gamma massima di trasmissione di u signale | 30 chilometri |
| Tempu di implementazione | ≤5 minuti (assemblaggio à sganciu rapidu senza strumenti) |
Cunfrontu di e taglie

Accessori

Stazione di terra di Dragonfish

Trasmissione Autel Smart Antenna (ASAT) (Opzionale)

Autel Dragonfish Nest (Facoltativo)

Ripetitore di Dragonfish (Opzionale)
Pruduttu d'adattazione

Anti-contrabbando costiero

Applicazione di a pulizza

Prevenzione di l'incendii forestali

Ispezione di e Linee Elettriche

Ispezione di u trafficu






